
前言
本文主要解读Takanori Senoh在聚焦式光场图像的多视角转换方向上做的一系列工作。我们假定阅读者已经掌握了一定的背景知识。下面直接切入正题。
m57272 - Conversion of Single-focused Plenoptic 2.0 Lenslet Image to Multiview Image
Introduction
文章首先点明主旨:本文引入了一个新的Lenslet to Multiview转换软件。然后介绍了一些背景,列举了一些创新点。最后是一大堆输入参数的简写,下文中我们会将它们全部替换为人类可读的形式。
Lenslet Image to Multi-view Conversion
整个转换过程可以被拆分为五小步
- 读标定数据并确定lenslet结构。
- 亮度校正。
- 估计patch尺寸。
- 根据输入参数平滑patch尺寸图。
- 提取patch再拼合为multi-view图像。
Lenslet Image Parameter
本小节对应步骤:读标定数据并确定lenslet结构。
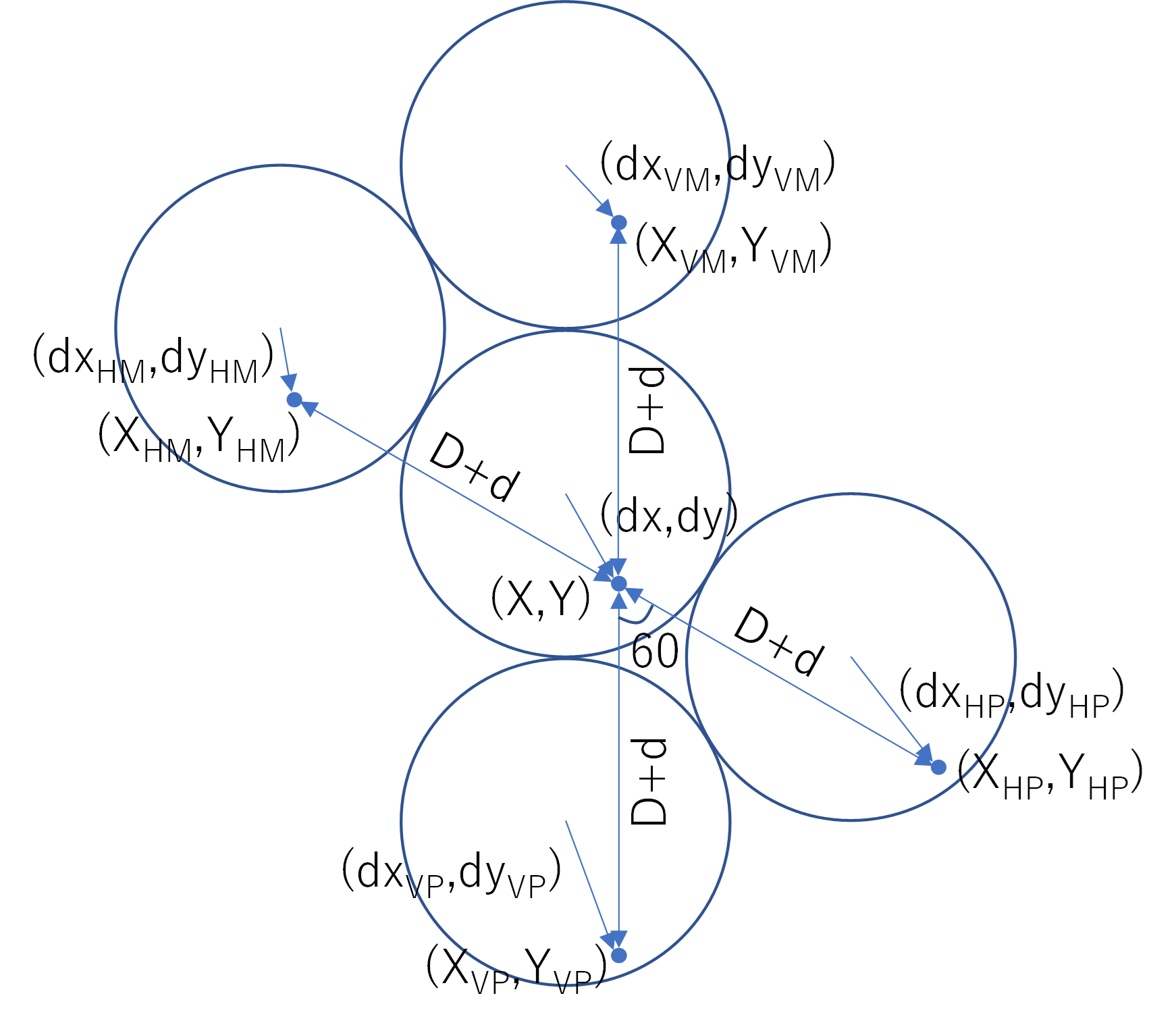
待确定的参数中,horizontal/vertical lenslet pitch (ld/lp)指的是每行中各个相邻的MI的间距(ld,约等于直径),以及两行的间距(lp,约等于$\sqrt{3}/2$倍直径)。后面作者又用connecting来描述一行中MI相紧邻的现象,以及staggered来描述行与行之间交错的位置关系。
各参数对应的物理含义如下图所示。
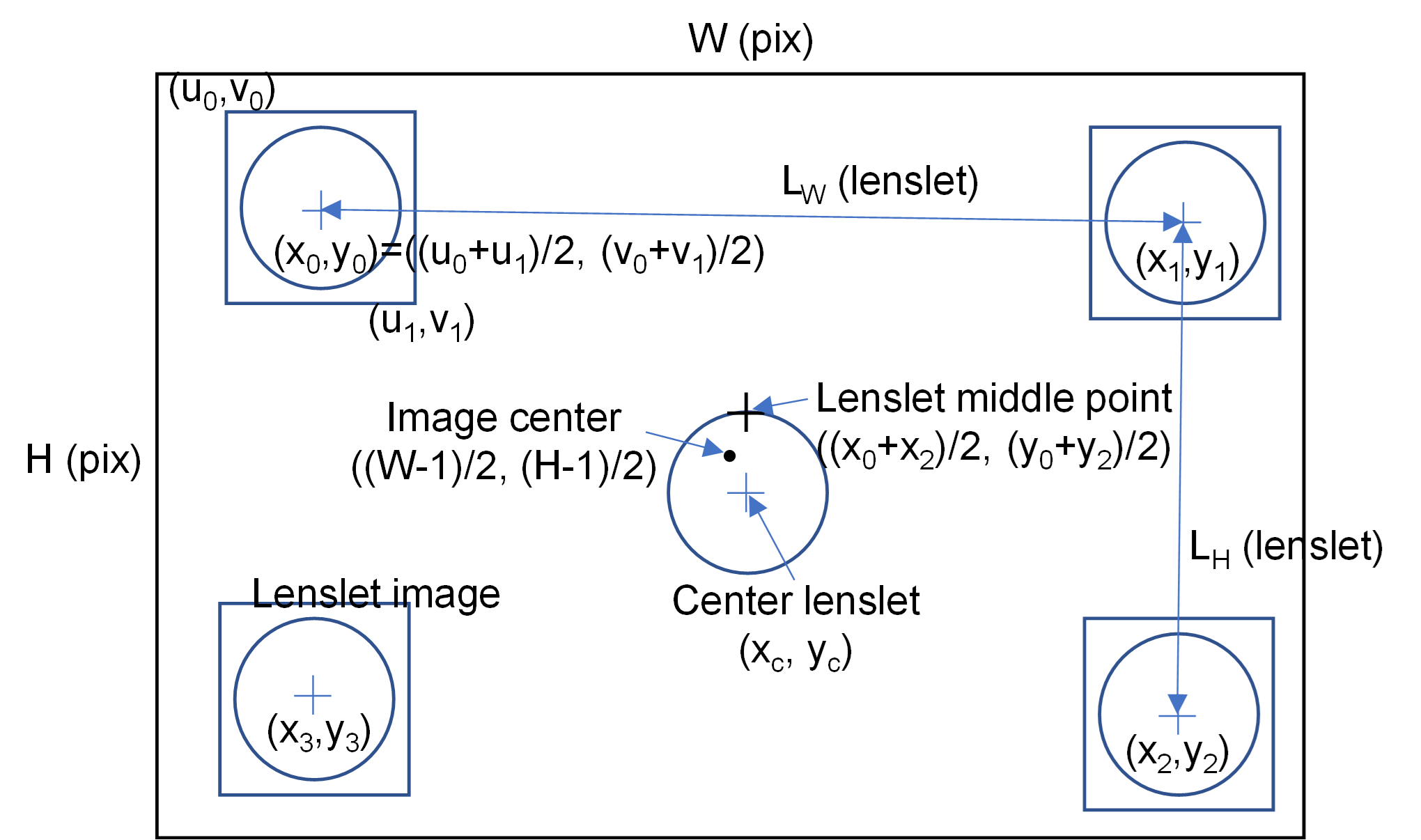
第一步,获取四个角上的MI的坐标(xi,yi), i = 1, 2, 3, 4。
第二步,计算连续(connecting)的一行中MI的数量LW,以及交错(staggered)行的数量LH。
第三步,计算每个连续行中相邻MI的间距ld,以及交错行之间的间距lp。
第四步,计算整个光场图像的旋转角rot。
第五第六步他们用了一套非常复杂的方法来确定其他MI的中心,这里略过。
Luminance Compensation
本小节对应步骤:亮度校正。
因为MI的边缘区域(Fringe Area)存在亮度衰减(Luminance Decay),因此需要在这些区域实施亮度补偿。
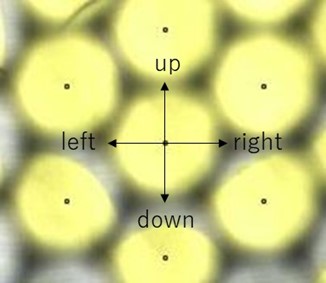
首先,通过下图所示的左上、右上、左下、右下和当前MI这五个位置计算亮度衰减曲线。其中中心MI应当为纯色。
下图为亮度衰减曲线。
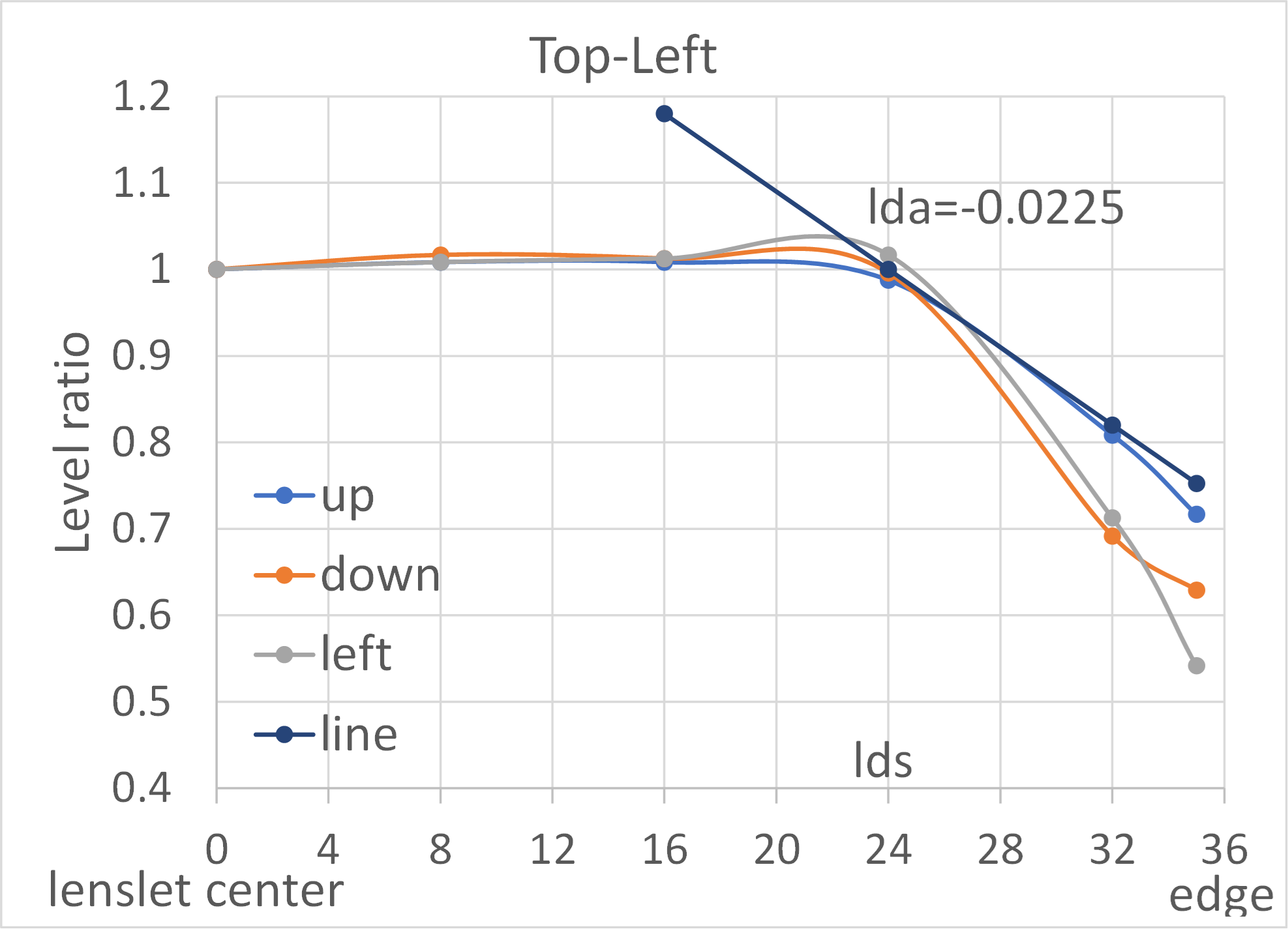
选取衰减速率最小的(shallowest)的一条曲线,并使用一次函数(疑似)拟合其衰减部分。然后我就看不懂了,为什么亮度衰减可以只出现在图像的一半区域?为什么需要分别计算起始斜率和终止斜率?
随后作者还说除了MI内的衰减,在图像的某些大块区域还存在方向性的亮度衰减。我已经看不懂了,跳过。
Patch Size (Depth) from Matching Distance
本小节对应步骤:估计patch尺寸。
文中Main Lens Image意为主透镜所成实像。下图展示了主透镜实像经过微透镜阵列在传感器上成像的过程。
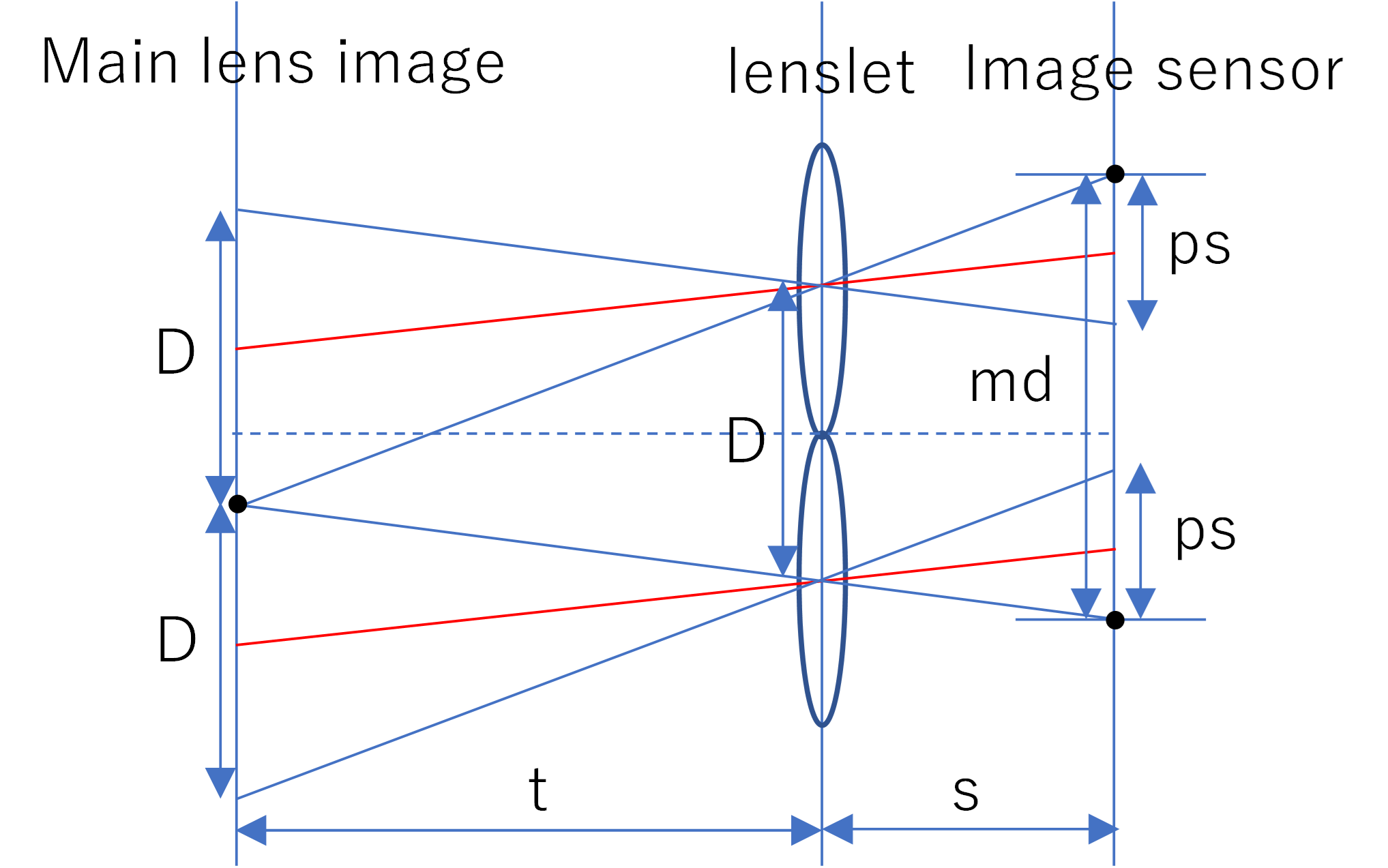
主透镜实像上的同一点在传感器上的距离记作md(matching distance,如下图所示)。ps即patch大小(patch size),D为各个patch在主透镜实像上对应的大小。并且二者存在几何关系ps = sD/t。只要按照正确的ps取出这些patch再将它们缩放至大小D并拼合,我们就能无缝地还原主透镜图像。
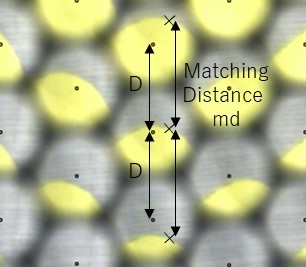
计算patch size的流程如下:
第一步,手动敲定mdMax和mdMin,也就是md的取值范围,以使得匹配区域不超出MI边界。
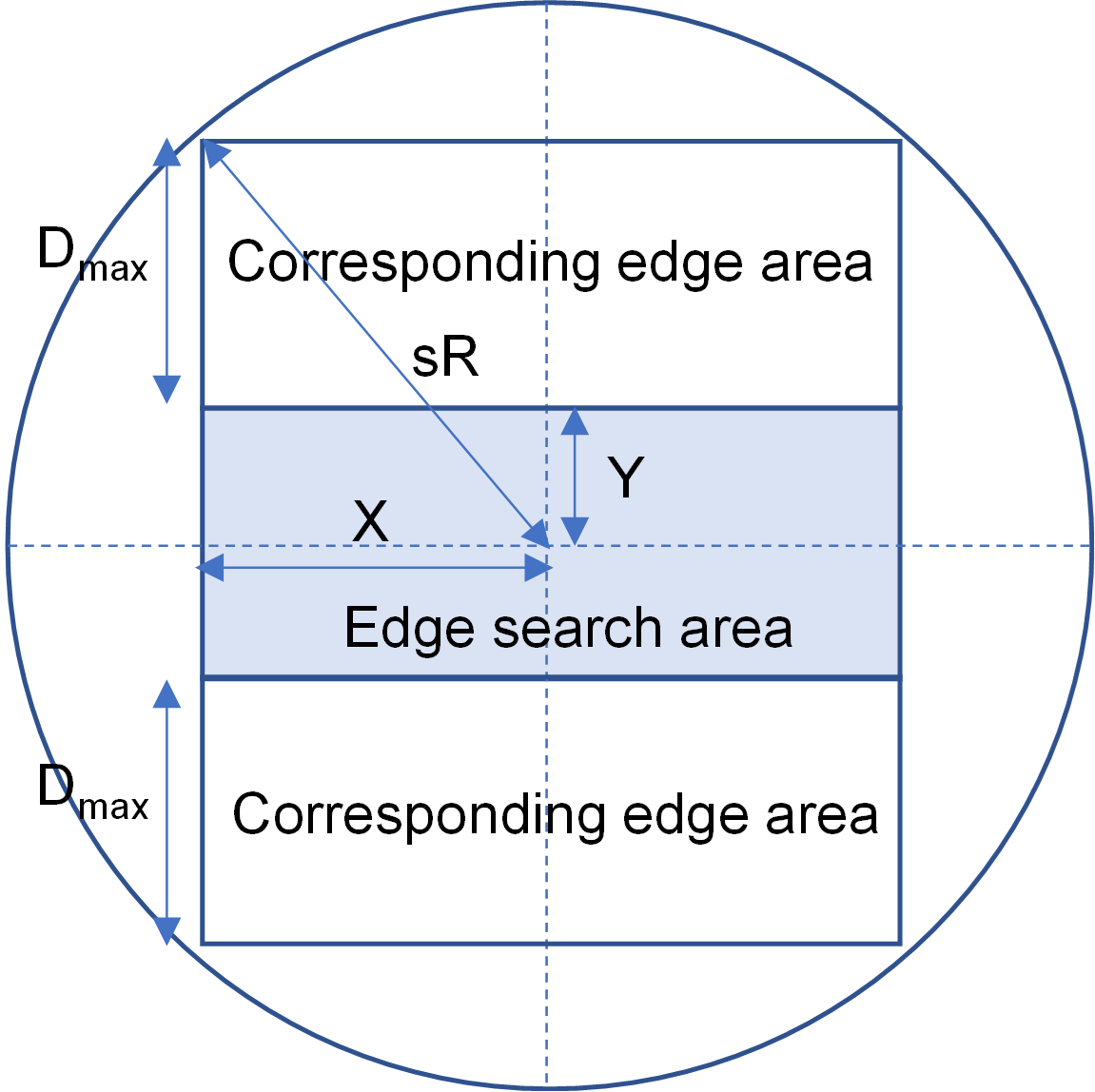
第二步,确定如下图所示的大小为2X × 2Y的最大边缘搜索区域(maximum edge search area)。这个图比较抽象,是上中下三个MI叠在一起的效果,其中edge search area来自中间MI,其余两个关联边缘区域(corresponding edge area)分别来自上下两个MI。
然后就是让我比较懵逼的一句话:“由于MI中的补丁尺寸是共通的,因此在计算匹配误差时采用了最陡的边缘,这样既减少了补丁尺寸的搜索,又提高了补丁尺寸的可靠性。在选择最小误差进行立体匹配时,该边缘必须包含在三个连接的小透镜中。”虽然不完全理解这么做的理由,但作者这里应该是想用【同时出现在相邻三个MI中的那个最陡的边缘】来计算md。
搜索区域的高度被近似地设定为:
Y = 2/3(sR−Dmax)/3
其中sR为safe radius的缩写。作者认为虽然MI边缘已经做了亮度补偿,但其中的纹理依然“不可信”,属于“unsafe area”,并把sR设置为0.4D,也就是0.8R。而Dmax = mdMax − D是为后续的滑动窗口匹配预留的高度。
有了Y,搜索区域的宽X可直接利用勾股定理求得。
第三步,计算梯度权重图;第四步,估计patch大小。作者认为,梯度s越大的区域,纹理可信度越高;纹理越可信,匹配失误所导致的惩罚(Ws乘上那一堆DDD的东西)就越大;惩罚越大,接受当前patch尺寸的估计结果所需要的cost就越大。如果【当前帧中某个MI的patch大小的估计结果所对应的cost】大于【前一帧同一位置MI的cost】,则拒绝当前的估计结果,沿用之前的patch大小。除了针对各个MI计算局部cost,作者还会计算一个全局cost。如果全局cost过高,则一次性拒绝当前帧下所有的估计结果,转而采用上一帧的估计结果。
而“匹配失误”是通过当前MI的patch大小与周围MI的patch大小作差得到。m57813中改进了这个量化策略。
Multi-view Conversion
按原本的MI位置拼贴就行。作者这里还做了一个很复杂的亚像素插值,我感觉1/4像素精度就很可以了。
m57813 - Conversion of Multi-Focused Plenoptic 2.0 Lenslet Image to Multiview Image
该提案以m57272为基础,引入json格式的配置文件,并减少了输入参数。
步骤划分和m57272基本一致。
读标定数据并确定lenslet结构这一步,新提案减少了参数量。
估计patch尺寸这一步,新提案添加了一个额外的前置步骤,用高斯模糊减少原图中的高频噪声。
亮度补偿的步骤被删除,因为从主透镜虚像成像时MI边缘会变得更亮,而从主透镜实像成像时MI边缘会更暗。主透镜实像虚像的区别如下图所示。
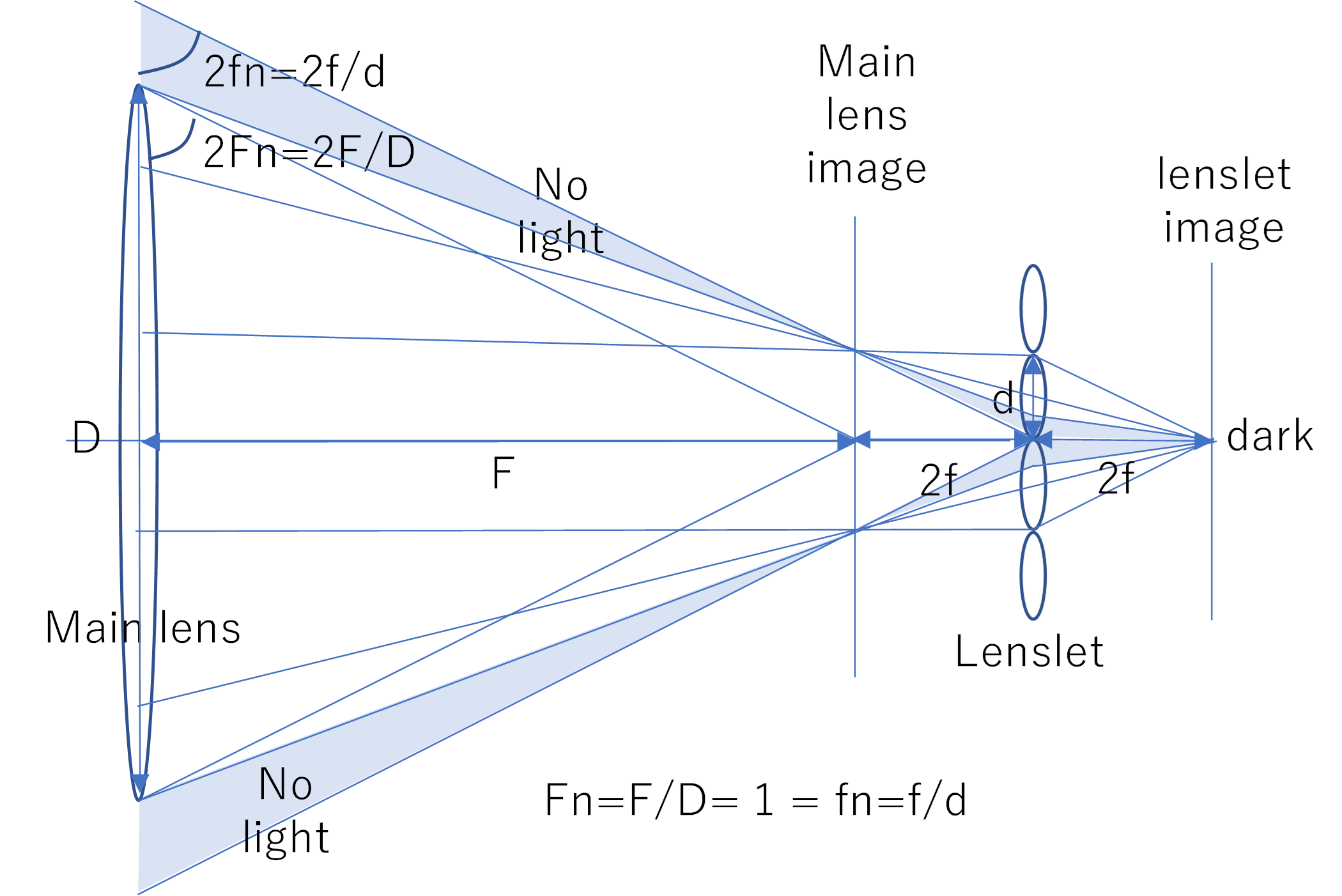
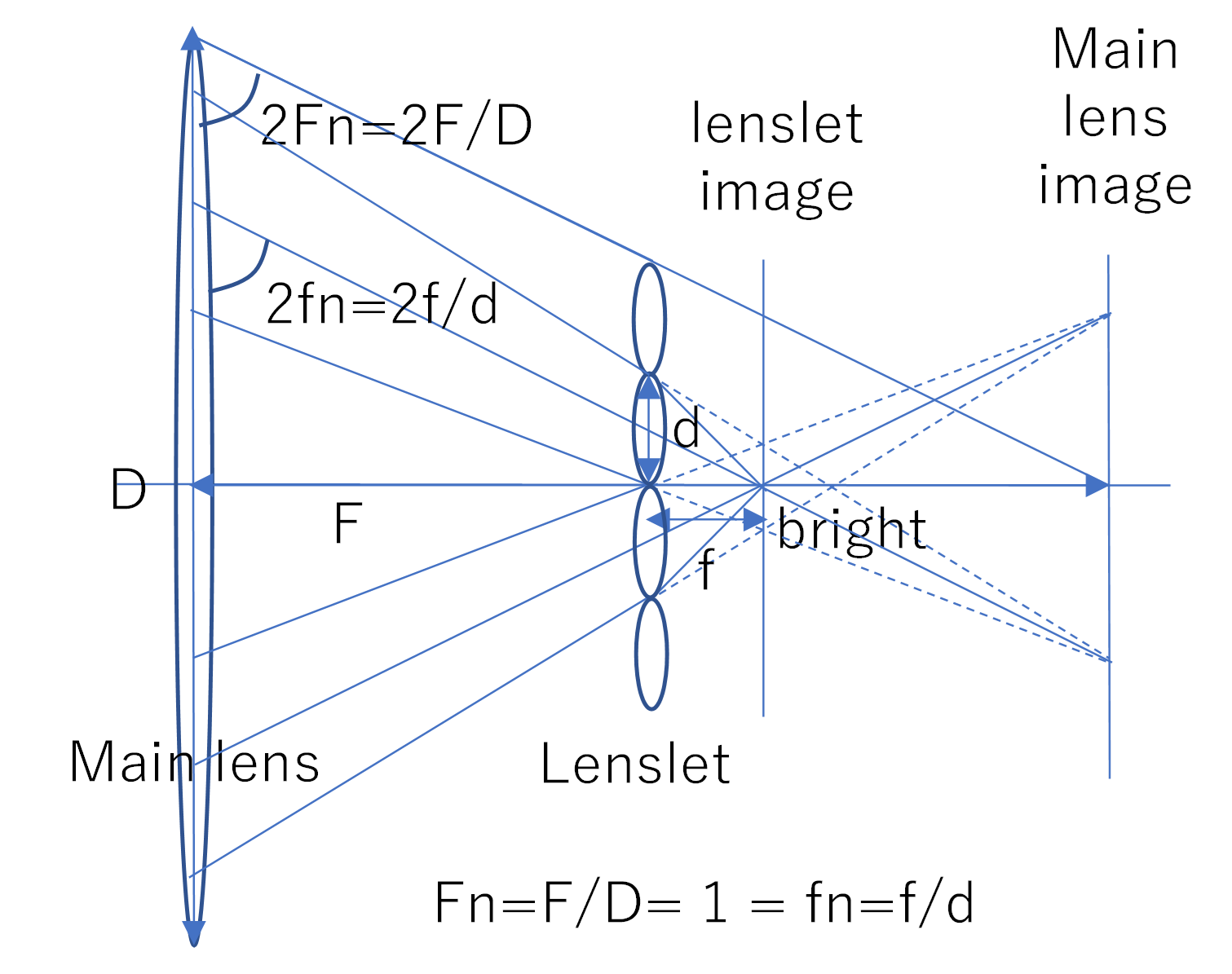
作者认为兼顾这两种情况的补偿方案太复杂,就干脆只从直径70%的区域提取多视角,亮度异常的区域舍弃不用。
后续,作者还优化了匹配失误的度量步骤,使用当前MI中的待匹配区域(3x3大小)与周围MI中的对应区域作差,差值越大则匹配失误越大,如下图所示:
Multiview from micro-lens image of multi-focused plenoptic camera
是m57813的精简版,跳过。